Enkoder inkrementalny - zasada działania i zastosowanie
Enkoder inkrementalny zastosowanie
Enkodery inkrementalne zasadniczo służą do pomiaru kąta, położenia ale również do pomiaru prędkość obrotowej oraz kierunku ruchu. W skrócie enkoder zamienia ruch mechaniczny obrotowy lub liniowy na impulsy które wykorzystujemy w naszym sterowaniu. Często enkoder obrotowy jest spięty z urządzeniem działającym liniowo dzięki czemu uzyskujemy pomiar liniowy.
Enkoder inkrementalny zasada działania
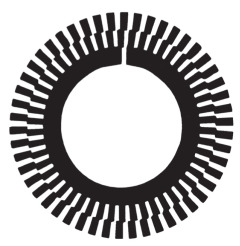
Zasada działania opiera się o tarczę kodową na której są naprzemienne elementy (prążki) na przykładzie układu optycznego – mamy nadrukowane prążki dzięki czemu zyskujemy przestrzenie które przepuszczają światło i te które nie przepuszczają, ustawione naprzemiennie (Tarcza kodowa pokazana na zdjęciu poniżej).
Zacznijmy od wewnątrz – wewnętrzy okrąg odpowiada za ustalenie punktu zero, dzięki czemu mamy punkt odniesienia tarczy. Kolejny okrąg odpowiada za pomiar kąta, ilość podziałów odpowiada za dokładność kątową enkodera. Ostatni zewnętrzny okrąg jest taki sam jak środkowy tyle że przesunięty o 90* dzięki czemu mamy dodatkowo informację o kierunku obrotu.
Są dwa rodzaje enkoderów inkrementalnych –
1. Optyczne
2. Magnetyczne
Pierwszy rodzaj optyczne, składa się z diody wysyłającej wiązkę światła, element odbierający wiązkę światła i tarczy dzięki której poprzez elementy przepuszczające i blokujące wiązkę światła (prążki) mamy możliwość pomiaru.
Magnetyczne działają na zasadzie tarczy która ma magnetyczne pola (zęby) na tarczy i czujnik halla odpowiadającego za pomiar elementów na tarczy.
Rozdzielczość enkodera
Rozdzielczość enkodera inkrementalnego określa nam ilość impulsów na obrót, im większa rozdzielczość tym mamy dokładniejszy pomiar kąta naszego układu. Czyli załóżmy że mamy enkoder o rozdzielczości 2048 – oznacza to że na jeden obrót dostaniemy 2048 impulsów czyli dokładność kątowa jaką uzyskamy to 0,17 * na jeden impuls.
Enkoder inkrementalny - wady i zalety
Wadą enkoderów inkrementalnych jest to, że po zaniku zasilania nie znamy pozycji układu (urządzenia) i po każdym zasileniu maszyny należy zbazować układ. Porównanie – wyobraź sobie że jesteś na dobrej zabawie i nad ranem budzisz się w środku lasu, masz kompas widzisz słońce wiec określenie dokładnego miejsca nie jest możliwe – to jest enkoder inkrementalny w odróżnieniu od enkodera absolutnego w którym po przebudzeniu macie w telefonie nawigację, znacie dokładną pozycję.
Zaletą jest ich prostota wykonania i budowy oraz łatwości wykorzystania sygnału z czujnika.